小型無人機の利活用と技術開発のロードマップ
小型無人機の利活用と技術開発のロードマップと制度設計に関する論点整理(案)
- 昨年12月より、関係府省庁、メーカー、利用者等の団体をメンバーとする「小型無人機に係る環境整備に向けた官民協議会」において検討。
- 「小型無人機の利活用と技術開発のロードマップ」を取りまとめるとともに、安全確保に向けた制度設計の論点を整理、検討の方向性を提示。
- 今年夏に、安全確保に向けた制度設計の方針を取りまとめ。
小型無人機の利活用と技術開発のロードマップ
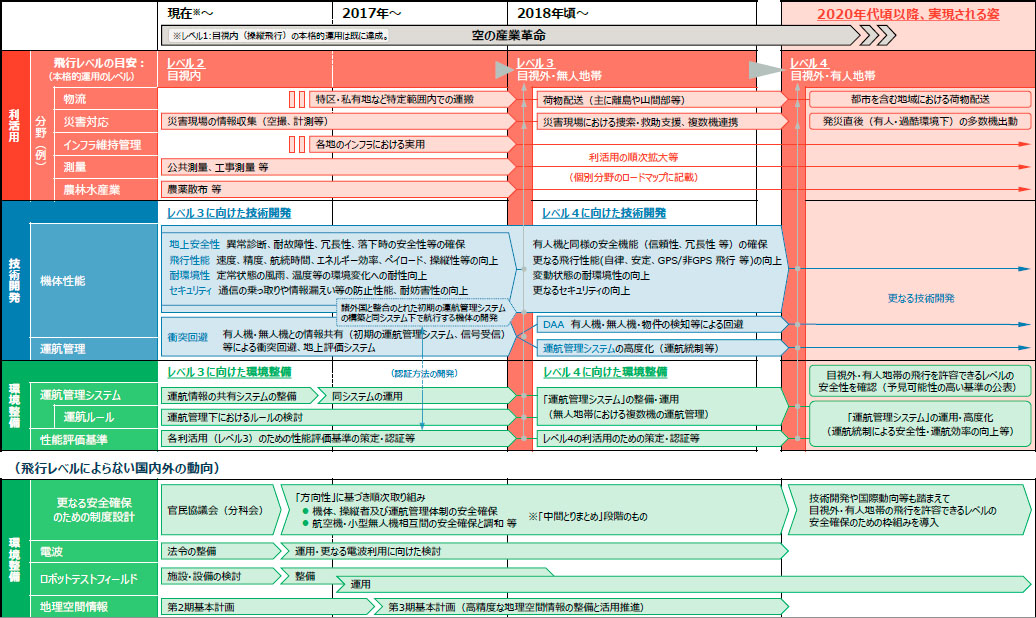
小型無人機の将来的な利用形態(次の4段階のうちレベル3,4)の本格化に向け、必要な技術開発や環境整備に関する事項を整理。
レベル1(目視内・操縦飛行)
レベル2(目視内)
レベル3(離島・山間部等の無人地帯での目視外)
レベル4(都市部等の有人地帯での目視外)
特に「早ければ3年以内(2018年内)に荷物配送を可能とする」ことを目指し、2020年代には都市を含む地域における荷物配送等も実現されるよう、航続時間や風雨等への耐性の向上、衝突回避機能、運航管理システムの構築等のための技術開発の支援等を行う。
1.小型無人機の段階的発展に向けたロードマップ(飛行レベルによる整理)
小型無人機の飛行形態を、目視内/外、有人/無人地帯などの別により「飛行レベル1~4」として分類。現在もすべてのレベルの飛行を個別に行うことはできるが、本ロードマップにおいては、常時かつ全国的な運用(本格的運用)における飛行レベル(そのような運用を可能とする技術レベルが達成された状態)について、それが達成されるべき時期を目標として示す。
【ポイント】
小型無人機(ドローン)による「空の産業革命」に向けて、早ければ3年以内にドローンを使った荷物配送(レベル3)を可能にするとともに、2020年代頃からは都市を含む地域において多数の自律飛行するドローンが活躍する社会(レベル4)を実現することを目指し、そのために必要な技術開発と環境整備を進めていく。
具体的には、現在の主たる運用形態(レベル1、2)とは異なるレベル3、4の実現に向けて、風雨等の環境変化への耐性の飛躍的向上や、他の飛行体(有人機、無人機等)や障害物との干渉を避けつつ飛行するための衝突回避、目視外飛行等における離着陸時の安全確保、特定の空域における運航管理のための技術開発と環境整備を行う。
(画像をクリックすると大きくなります)
【補足】
<利活用>
◆ レベル4における飛行…単機の飛行を前提に衛星測位等を利用しプログラムされたルートどおりに飛行するだけでなく、運航管理システムや衝突回避等の技術によって他の有人機・無人機・物件等を避けながら飛行するなど有人地帯を目視外飛行するのに十分な性能を備えた状態の飛行。
<技術開発>
◆地上安全性…他の技術開発項目も地上安全性に資するものであるが、それ以外の地上安全性に係るものを「地上安全性」に含
めて整理した。◆異常診断… 機体が自らの異常を検知し、安全な緊急着陸など適切な対応を行う機能。◆落下時の安全性…
万が一、落下しても地上の人や物件が安全であること(落下の衝撃が小さい、電池の破損等による火災が起きない等)。◆GPS/
非GPS飛行…GPS信号の受信の有無によらず安定飛行する機能。
◆DAA … Detect and Avoid(他の無人機や有人機、地形や建造物、悪天候等の検知と回避)もしくはSense and Avoid(SAA)とも言う。
◆運航管理システム…小型無人機の機体や操縦者等の登録・管理に加えて、空域や電波の共用を効率的に行うための地上支援システム。空域の共用・管理については、目視内飛行では操縦者が担う周囲の状況認識~衝突回避を代替する機能が求められる。これらをDAAのみで実現するのは難しいため、運航管理システムを通じて関連する情報を集約・共有することによって支援する。例えば無人機の飛行計画やリアルタイムの飛行データをもとに空域や飛行経路を割り当てて安全間隔を確保する。
◆地上評価システム…運航管理システム、運航ルールに従った空域内のすべての無人航空機の運航をシミュレーションし、空域共有の成立性を検証するためのシステム。
◆信号受信…例えばトランスポンダやADS-Bあるいは、これらに相当する電波機器の信号受信による検知。
<環境整備>
◆ロボットテストフィールド…福島イノベーション・コースト構想におけるロボットテストフィールド・研究開発拠点整備事業。
◆性能評価基準… 各分野毎の性能を評価するための基準。なお、性能の評価やその実現に向けた技術開発に当たっては、地上でもその評価ができるシステムも必要となる。
◆「電波」の法令の整備…「ロボット用電波利用システム」に係る法令の整備。
◆地理空間情報…地理空間情報活用推進基本計画(第3期は平成29~34年)
<国際動向>
◆ICAO RPASP…International Civil AviationOrganization Remotely Piloted Aircraft Systems Panel:国際民間航空機関遠隔操縦航空機システムパネル。
◆IFR…計器飛行方式:航空機の飛行経路や飛行の方法について常時航空交通管制の指示を受けつつ飛行する方式。
◆JARUS…Joint Authorities for Rulemaking on Unmanned Systems:有志国の航空当局による無人機システムに関する国際規則づくりについて議論するため発足。
◆ISOにおける標準検討…ISO/TC20/SC16 Unmanned aircraft systemsにおける国際標準の検討。
◆NASA UTM…米国NASAが構想するUnmanned Aerial Systems Traffic Managementの開発段階(BUILD1~BUILD4)
<フォローアップ・改訂>
利活用・技術開発の動向や諸外国の制度設計に関する検討状況等は、今後も常に変化していくことが予想される。そのため、技術の進展等により安全性が担保されることを前提として、引き続き、本ロードマップの達成状況を含めた情報収集とフォローアップに努め、適宜、見直しを行っていく。また、特に個々の地域レベルでの実証や実験は、全国レベルの運用に先行する場合も遺漏なく対応できるような制度設計とする。
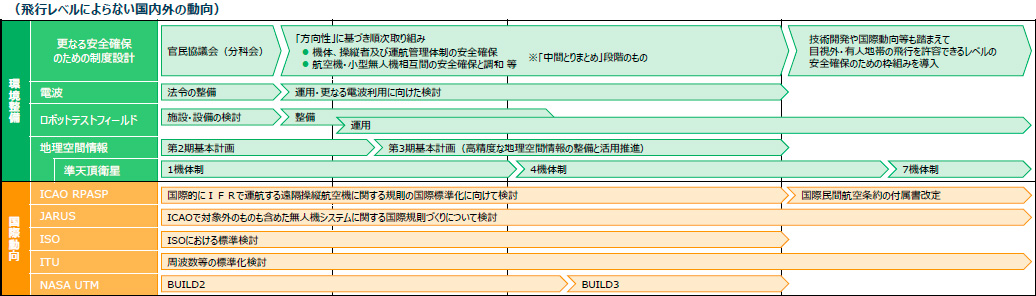
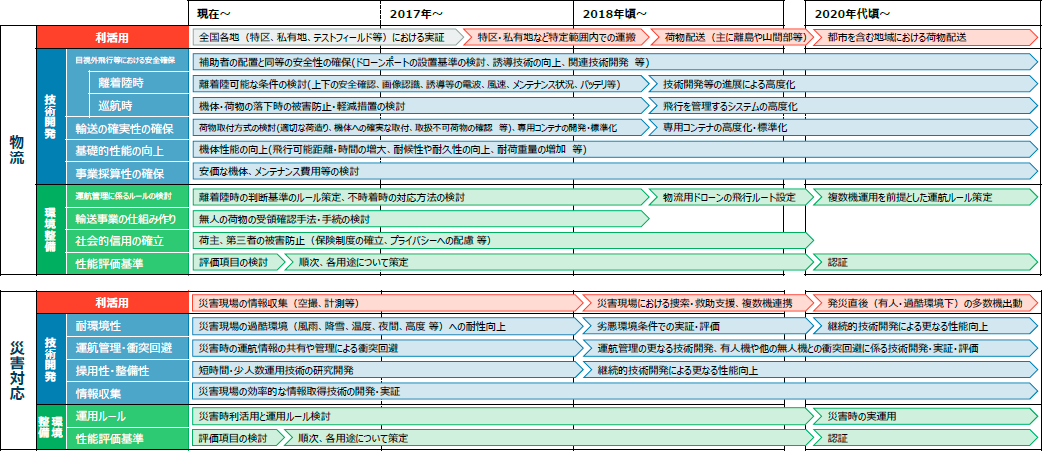
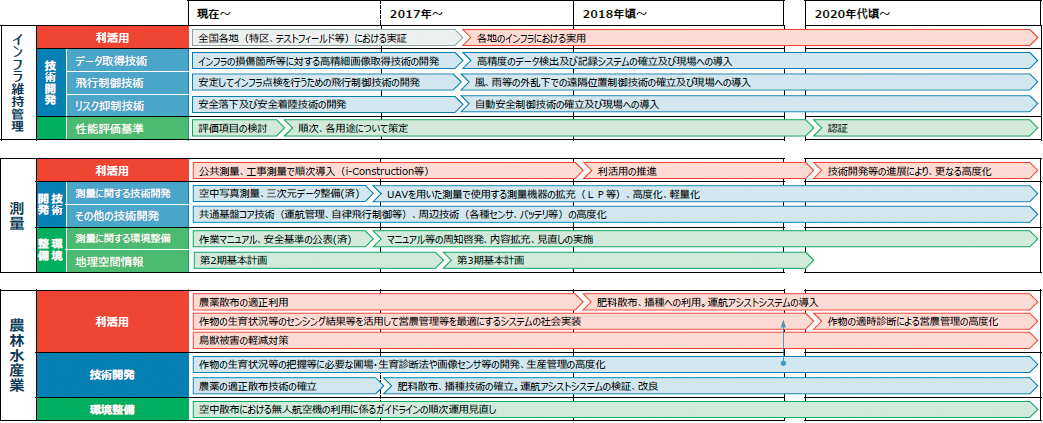
2.個別の利活用分野における小型無人機のロードマップ
(画像をクリックすると大きくなります)
安全確保に向けた制度設計に関する論点整理と検討の方向性
- 制度設計に当たっての基本的考え方
-制度の柔軟性の確保、技術革新を促進する、安全性の総合判断(官民連携)、合理的な範囲での規制、国際的な調和に配慮。 - 機体、操縦者、運航管理体制
目的(趣味、ビジネス)を問わない、リスクの程度に応じた制度設計が必要。
民間の能力、知見を活用することが必要。 - 航空機・小型無人機相互間の安全確保
無人機側の回避ルール、小型無人機間の衝突回避ルールの策定が必要。
空港等では、飛行制限の強化が必要。
有人機、無人機の飛行情報を共有する仕組みの構築、システム化の検討が必要。 - その他(保険の活用、プライバシー保護)
※【出典】http://www.kantei.go.jp/